Робот манипулятор своими ркуами
СКАЧАТЬ
-
Рейтинг:
-
Сложность:
Средняя -
Файлов:
3 шт. -
Деталей:
7 шт.
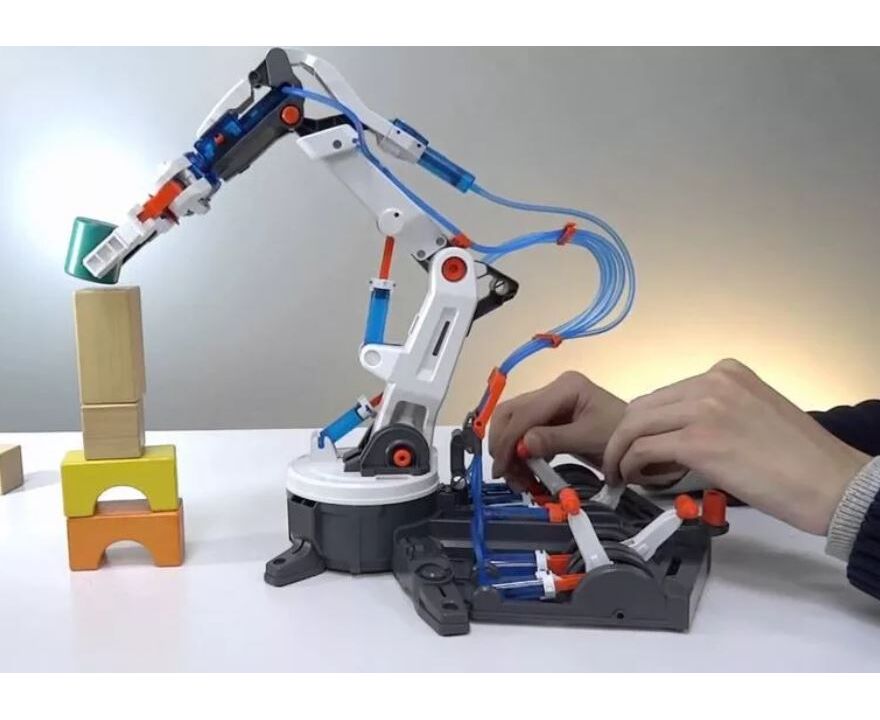
Все мы давно знаем промышленных роботов манипуляторов. Но теперь их легко можно сделать своими руками! Робот манипулятор на ардуино не только легко собирается из 3D печатных деталей, но и достаточно просто управляется! 3D модель робота манипулятора скачать без регистрации и совершенно бесплатно всегда можно на нашем сайте!
Наглядная схема робота манипулятора, или так называемой Роборуки, изображена на картинках. Скачать 3D модели можно одним архивом. Далее, для просмотра и печати 3D деталей на принтере, Вам понадобиться программа Repetier Host, о которой мы неоднократно писали в наших статьях.
Из особенностей данного робота на платформе Arduino можно отметить сложность его конструкции. Роборука состоит из множества рычагов, которые позволяют ей двигаться по всем осям, хватать и перемещать различные вещи, используя всего 4 серво-мотора. Собрав собственными руками такого робота, Вы точно сможете удивить своих друзей и близких возможностями и приятным видом данного устройства! Помните, что для программирования Вы всегда сможете воспользоваться нашей графической средой RobotON Studio!
Роборука состоит из множества рычагов, которые позволяют ей двигаться по всем осям, хватать и перемещать различные вещи, используя всего 4 серво-мотора. Собрав собственными руками такого робота, Вы точно сможете удивить своих друзей и близких возможностями и приятным видом данного устройства! Помните, что для программирования Вы всегда сможете воспользоваться нашей графической средой RobotON Studio!
Если у Вас появятся вопросы или замечания, мы всегда на связи! Создавайте и выкладывайте свои результаты!
Особенности:
Чтобы собрать робота манипулятора своими руками, вам понадобится довольно много компонентов. Основную часть занимают 3D печатные детали, их около 18 штук (печатать горку необязательно).Если вы скачали и распечатали все необходимое, то вам потребуются болты, гайки и электроника:
- 5 болтов М4 20мм, 1 на 40 мм и соответствующие гайки с защитой от раскрутки
- 6 болтов М3 10мм, 1 на 20 мм и соответствующие гайки
- Макетка с соединительными проводами или шилд
- Arduino Nano
- 4 серво мотора SG 90
После сборки корпуса ВАЖНО убедиться в его свободной подвижности. Если ключевые узлы Роборуки двигаются с трудом, серво-моторы могут не справиться с нагрузкой. Собирая электронику, необходимо помнить, что подключать цепь к питанию лучше после полной проверки соединений. Чтобы избежать поломки серво-приводов SG 90, не нужно крутить руками сам мотор, если нет необходимости. В случае, если нужно разработать SG 90, нужно плавно подвигать вал мотора в разные стороны.
Если ключевые узлы Роборуки двигаются с трудом, серво-моторы могут не справиться с нагрузкой. Собирая электронику, необходимо помнить, что подключать цепь к питанию лучше после полной проверки соединений. Чтобы избежать поломки серво-приводов SG 90, не нужно крутить руками сам мотор, если нет необходимости. В случае, если нужно разработать SG 90, нужно плавно подвигать вал мотора в разные стороны.
Характеристики:
- Простое программирование ввиду наличия малого количества моторов, причем одного типа
- Наличие мертвых зон для некоторых серво-приводах
- Широкая применимость робота в повседневной жизни
- Интерсная инженерная работа
- Необходимость использования 3D принтера
Комментарии:
модифицируем джойстик для роботизированного манипулятора своими руками и загружаем код на Ардуино
Эта статья — вводное руководство для новичков по созданию роботизированных рук, которые программируются при помощи Ардуино. Концепция состоит в том, что проект роборуки будет недорогим и простым в сборке. Мы соберём несложный прототип с кодом, который можно и нужно оптимизировать, это станет для вас отличным стартом в робототехнике. Робот-манипулятор на Ардуино управляется хакнутым джойстиком и может быть запрограммирован на повторение последовательности действий, которую вы зададите. Если вы не сильны в программировании, то можете заняться проектом в качестве тренировки по сборке «железа», залить в него мой код и получить на его основе базовые знания. Повторюсь, проект достаточно простой.
Концепция состоит в том, что проект роборуки будет недорогим и простым в сборке. Мы соберём несложный прототип с кодом, который можно и нужно оптимизировать, это станет для вас отличным стартом в робототехнике. Робот-манипулятор на Ардуино управляется хакнутым джойстиком и может быть запрограммирован на повторение последовательности действий, которую вы зададите. Если вы не сильны в программировании, то можете заняться проектом в качестве тренировки по сборке «железа», залить в него мой код и получить на его основе базовые знания. Повторюсь, проект достаточно простой.
На видео — демка с моим роботом.
Шаг 1: Список материалов
Нам понадобится:
- Плата Ардуино. Я использовал Уно, но любая из разновидностей одинаково хорошо справится с задачами проекта.
- Сервоприводы, 4 самых дешевых, что вы найдёте.
- Материалы для корпуса на ваш вкус. Подойдёт дерево, пластик, метал, картон.
 Мой проект собран из старого блокнота.
Мой проект собран из старого блокнота. - Если вы не захотите заморачиваться с печатной платой, то понадобится макетная плата. Подойдёт плата небольшого размера, поищите варианты с джамперами и блоком питания — они бывают достаточно дешевы.
- Что-то для основания руки — я использовал банку от кофе, это не самый лучший вариант, но это всё, что я смог найти в квартире.
- Тонкая нить для механизма руки и иголка для проделывания отверстий.
- Клей и изолента, чтобы скрепить всё воедино. Нет ничего, что нельзя было бы скрепить изолентой и горячим клеем.
- Три резистора на 10K. Если у вас не найдётся резисторов, то в коде на такие случаи есть обходной манёвр, однако лучшим вариантом будет купить резисторы здесь.
 Мой проект собран из старого блокнота.
Мой проект собран из старого блокнота.Шаг 2: Как всё работает
На приложенном рисунке изображен принцип работы руки. Также я объясню всё на словах. Две части руки соединены тонкой нитью. Середина нити соединена с сервоприводом руки. Когда сервопривод тянет нить — рука сжимается.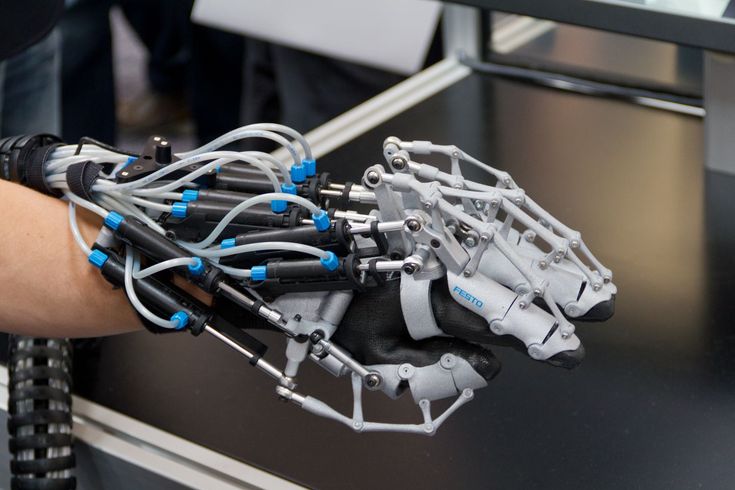 Я оснастил руку пружиной из шариковой ручки, но если у вас есть более гибкий материал, можете использовать его.
Я оснастил руку пружиной из шариковой ручки, но если у вас есть более гибкий материал, можете использовать его.
Шаг 3: Модифицируем джойстик
Предположив, что вы уже закончили сборку механизма руки, я перейду к части с джойстиком.
Для проекта использовался старый джойстик, но в принципе подойдёт любой устройство с кнопками. Аналоговые кнопки (грибы) используются для управления сервоприводами, так как по сути это просто потенциометры. Если у вас нет джойстика, то можете использовать три обычных потенциометра, но если вы, как и я, модифицируете старый джойстик своими руками, то вот что вам нужно сделать.
Я подключил потенциометры к макетной плате, у каждого из них есть по три клеммы. Одну из них нужно соединить с GND, вторую с +5V на Ардуино, а среднюю на вход, который мы определим позже. Мы не будем использовать ось Y на левом потенциометре, поэтому нам нужен только потенциометр над джойстиком.
Что касается переключателей, соедините +5V с одним его концом, а провод, который идёт на другой вход Ардуино со вторым концом. Мой джойстик имеет общую для всех переключателей линию на +5V. Я подключил всего 2 кнопки, но затем подключил еще одну, так как в ней появилась необходимость.
Мой джойстик имеет общую для всех переключателей линию на +5V. Я подключил всего 2 кнопки, но затем подключил еще одну, так как в ней появилась необходимость.
Также важно обрезать провода, которые идут к чипу (черный круг на джойстике). Когда вы завершите всё вышеописанное, можно приступить к проводке.
Шаг 4: Электропроводка нашего устройства
На фотографии изображена электропроводка устройства. Потенциометры — это рычажки на джойстике. Локоть (Elbow) — это правая ось Y, Основа (Base) — это правая ось X, Плечо (Shoulder) — это левая ось X. Если вам захочется поменять направление движения сервоприводов, просто смените положение проводов +5V и GND на соответствующем потенциометре.
Шаг 5: Загрузка кода
На этом этапе нам нужно скачать приложенный код на компьютер, а затем загрузить его на Ардуино.
Заметка: если до этого вы уже загружали код на Ардуино, то просто пропустите этот шаг — вы не узнаете ничего нового.
- Откройте ИДЕ Ардуино и вставьте в него код
- В Tools/Board выберите вашу плату
- В Tools/Serial Port выберите порт, к которому подключена ваша плата. Скорее всего, выбор будет состоят из одного пункта.
- Нажмите кнопку Upload.
 Скорее всего, выбор будет состоят из одного пункта.
Скорее всего, выбор будет состоят из одного пункта.Вы можете изменить диапазон работы сервоприводов, в коде я оставил заметки о том, как это осуществить. Скорее всего, код будет работать без проблем, вам нужно будет лишь поменять параметр сервопривода руки. Этот параметр зависит от того, как вы настроили нить, поэтому я рекомендую точно подобрать его.
Если вы не используете резисторы, то вам нужно будет модифицировать код в том месте, где я оставил об этом заметки.
Файлы
- RoboArm.txt
Шаг 6: Запуск проекта
Робот контролируется движениями на джойстике, рука сжимается и разжимается при помощи кнопки для руки. На видео показано, как все работает в реальной жизни.
Вот способ, которым можно запрограммировать руку:
- Откройте Serial Monitor в Ардуино ИДЕ, это позволить проще следить за процессом.
- Сохраните начальную позицию, кликнув Save.
- За один раз двигайте лишь одним сервоприводом, например, Плечо вверх, и жмите save.
- Активируйте руку также только на её шаге, а затем сохраняйте нажатием save. Деактивация также производится на отдельном шаге с последующим нажатием save.
- Когда закончите последовательность команд, нажмите кнопку play, робот перейдёт в начальное положение и затем начнёт двигаться.
- Если вы захотите остановить его — отсоедините кабель или нажмите кнопку reset на плате Ардуино.

Если вы всё сделали правильно, то результат будет похож на этот!
Надеюсь, урок был вам полезен!
Рука робота своими руками | Хакадей
17 октября 2019 г. Кристина Панос
В ноябре 2017 года мы показали вам роботизированную руку [Криса Эннина] с открытым исходным кодом и шестью степенями свободы. С тех пор он совершенствует руку и делает ее более доступной для всех, у кого нет возможности играть с промышленными роботами весь день на работе. Самым большим улучшением является то, что у AR2 была система управления с обратной связью, а у AR3 — разомкнутая. Если что-то заденет руку или она разобьется, бот автоматически вернется в прежнее положение. Он также автоматически калибруется с помощью концевых выключателей.
С тех пор он совершенствует руку и делает ее более доступной для всех, у кого нет возможности играть с промышленными роботами весь день на работе. Самым большим улучшением является то, что у AR2 была система управления с обратной связью, а у AR3 — разомкнутая. Если что-то заденет руку или она разобьется, бот автоматически вернется в прежнее положение. Он также автоматически калибруется с помощью концевых выключателей.
AR3 предназначен для фрезерования из алюминия или полностью напечатан на 3D-принтере. Двигатели и энкодеры управляются с помощью Teensy 3.5, а Arduino Mega обрабатывает ввод-вывод, захваты и сервоприводы. В демонстрационном видео после перерыва [Крис] демонстрирует впечатляющий контроль AR3 после короткого роботизированного балета, в котором два AR3 движутся в гипнотическом унисоне.
[Крис] создал сайт с кодом, своим управляющим программным обеспечением и всеми файлами STL. У него также есть обучающие видео по программированию и калибровке, и он написал очень подробное руководство по сборке. Между сайтом и сообществом, уже существующим из AR2, любой, у кого достаточно времени, денег и решимости, вероятно, мог бы создать его. Посмотрите плейлист [Криса] со сборками AR2 — люди используют их для фотографирования, сварки и подачи мороженого. Вы построили AR2? Хорошей новостью является то, что AR3 полностью обратно совместим.
Между сайтом и сообществом, уже существующим из AR2, любой, у кого достаточно времени, денег и решимости, вероятно, мог бы создать его. Посмотрите плейлист [Криса] со сборками AR2 — люди используют их для фотографирования, сварки и подачи мороженого. Вы построили AR2? Хорошей новостью является то, что AR3 полностью обратно совместим.
Захваты AR3 работают хорошо, как вы увидите на видео. Если вам нужно более мягкое прикосновение, попробуйте подражать щупальцу осьминога.
Читать далее «Рукоятка с открытым исходным кодом делает робототехнику доступной» →
Posted in Robots HacksTagged 6-DOF, arduino mega, замкнутый контур, управление с обратной связью, рука робота своими руками, шестиосевой робот, Teensy 3.5
4 января 2017 года Дженни Лист
Мы привыкли к проектам, которые берут повседневные предметы домашнего обихода и модифицируют или улучшают их, придавая им новые и захватывающие формы, которые их первоначальные дизайнеры никогда не планировали. Особая тема в этом начинании исходит от сообщества хакеров IKEA, которые берут продукты шведского мебельного магазина и используют их в качестве основы для своей работы.
Особая тема в этом начинании исходит от сообщества хакеров IKEA, которые берут продукты шведского мебельного магазина и используют их в качестве основы для своей работы.
Особенно изобретательный пример взлома ИКЕА — это проект [anastas.car] недорогого робота-манипулятора, напечатанного на 3D-принтере на основе лампы IKEA Tertial. Рассматриваемая лампа представляет собой относительно недорогую настольную лампу с балансировкой пружины, которая, если смотреть на нее под другим углом, имеет все металлические конструкции, готовые для манипулятора робота с 5 степенями свободы, в сочетании с напечатанными на 3D-принтере держателями сервоприводов для пяти сервоприводов на шарнирах. В полученном дизайне есть все файлы, доступные на Thingiverse, и, судя по видео, которое мы разместили ниже, излом делает довольно эффективную руку.
Читать далее «От лампы ИКЕА до руки робота» →
Posted in Robots HacksTagged сделай сам робот-манипулятор, ikea, ikea hacks, ikea lamp, robot arm
26 декабря 2015 г. , Джеймс Хобсон
, Джеймс Хобсон
[Антониопенамария] работает над гигантским роботом-манипулятором. Прелесть в том, что он публикует пошаговое руководство (в переводе) всего своего путешествия от начала до конца.
Почему он хочет построить гигантскую руку робота? Что ж, идея изначально пришла к нему несколько лет назад, когда он паял что-то вместе и подумал: «Чувак, мне действительно не помешала бы еще одна рука!». Поэтому он достал набор Meccano и построил мини-манипулятор. Ничего особенного, но это сработало. Оттуда он решил запрограммировать его и смог научить перемещать вещи из точки А в точку Б… по мере того, как он продолжал расширять свой маленький проект, видение росло, и теперь он работает над проектом D.I.M.E.R. — гигантская рука робота.
Продолжить чтение «Проект Гигантская рука робота» →
Posted in Robots HacksTagged рука робота, гигантская рука робота, рука робота
EvoArm 1.0 — комплект манипулятора с Arduino и Raspberry Pi
Программируемый манипулятор с Arduino, Raspberry Pi и камерой
Описание
Собери, учись, создавай
Робот с точностью, точностью, интеллектом и игрой настоящие крестики-нолики против вас и победа. И это только одна из возможностей EvoArm. Усовершенствованная с участием сотен пользователей, EvoArm предназначена для того, чтобы дать вам лучшее погружение в робототехнику от низкоуровневой электроники до высокоуровневого программирования.
И это только одна из возможностей EvoArm. Усовершенствованная с участием сотен пользователей, EvoArm предназначена для того, чтобы дать вам лучшее погружение в робототехнику от низкоуровневой электроники до высокоуровневого программирования.
См. варианты ценообразования
Интеллектуальный робот, с которым можно конкурировать
Используйте прилагаемый комплект компьютерного зрения для написания и исследования собственных программ ИИ, включая обнаружение и распознавание лиц, отслеживание лиц, отслеживание и захват объектов. Или попробуйте воссоздать прилагаемый код игры в крестики-нолики. Когда игра окончена, она даже сбрасывает игровое поле, поэтому вам не нужно этого делать!
Но и весело провести время с
Запрограммируйте песню один раз, а затем воспроизведите ее снова с помощью EvoArm. Используйте представленные в нашем примере последовательности воспроизведения нот и соедините их вместе, чтобы воспроизвести желаемую песню. Или напишите свой собственный алгоритм искусственного интеллекта, чтобы придумывать новые песни и заставлять EvoArm их воспроизводить!
Поставляется со всем необходимым для начала работы
EvoArm поставляется с готовыми упражнениями и задачами для изучения программирования роботов, включая оборудование и примеры приложений.
Программируемый
Вы можете купить любой типичный комплект робота-манипулятора в Интернете. Но как только вы его построите, что тогда?
Хотя сборка EvoArm с нуля доставит вам массу удовольствия, самое большое наслаждение — входящее в комплект программное обеспечение для программирования и управления.
После сборки и настройки EvoArm можно управлять и программировать с телефона или компьютера с помощью интуитивно понятного интерфейса без необходимости кодирования. Чтобы по-настоящему раскрыть его функции, его можно запрограммировать на Python, C++ или любом другом языке, который поддерживает публикацию сообщений ROS или выполнение HTTP-запросов.
Vision Kit
Apps
Learn
Draw
EvoApps
3 Уникальный подход к созданию физических приложений.
Спроектировать и распечатать функциональное оборудование и запрограммировать EvoArm для работы с ним. Ваша покупка включает в себя 4 приложения EvoApp, указанные ниже.
Решение
Play
Готов до ходов
Kitcontents
Содержание
Arduino UNO
Raspberry Pi
Arduino UNO
Raspberr SD-карта с предварительно настроенной ОС Raspbian Buster, операционной системой Robot (ROS) и OpenCV 3.4
Computer Vision Kit
Raspberry Pi Camera
Camera Mounting Bracket and Hardware
Upto 30fps streaming service
Impeccable Hardware
High Power Servo Motors
LEDS, Resistors, Switch
Breadboard
Batteries
45W Wall Power Supply
Специальная отвертка
Более 20 деталей конструкции для манипулятора робота
Кабели и проводка
Включенные комплекты аксессуаров и EvoApps
Towers of Hanoi Kit
Комплект для рисования белой доски
Комплект склада склада
Дополнительный: AI-с поддержкой Tic-Tac-Toe Kit
Спецификации
Спецификации
Axes: 5 градусов Freedom + Gripper
: 5 градусов Freedom + Gripper
. Макс. вылет по вертикали: 18″ или 460 мм
Макс. вылет по вертикали: 18″ или 460 мм
Макс. вылет по горизонтали: 14,5″ или 368 мм
Полезная нагрузка: 100 г при максимальном выдвижении
Источник питания: настенный адаптер 45 Вт, 110 В
Повторяемость: 1 мм
Вес: 1,5 фунта или 680G
4. Двигатель A в сборе
5. Двигатель B в сборе
6. Двигатель C в сборе
7. Двигатель D в сборе
8. Двигатель E в сборе
9. Двигатель F в сборе
10. Сборка захвата
11. Сборка ARM
12. Проводка ARM 1
13. Проводка ARM.
Примеры видеоинструкций по сборке
1. Аккумулятор в сборе
11. Сборка рычага
Поддержка
Неограниченная быстрая поддержка из Маунтин-Вью, Калифорния
8
80002 Drop In For Direct Factory Support At:
881 Castro St
Mountain View, CA 94041
650-318-1534
Customer Reviews
Arnar H.

У нас было беспроблемное использование робота. Я хотел убедиться, что вы знаете, что мы все еще наслаждаемся комплектом робота-манипулятора.
Мой младший сын (11 лет) немного использовал его, чтобы делать простые вещи (настраивать последовательности, выполнять упражнения).
Затем я отдал его своему старшему (16 лет). Он немного разбирается в Linux и начал изучать, как все устроено (rospi pubsub, поток команд, отправляемый с пи на ардуино и т. д.).
Калеб Н.
Из форума поддержки и обсуждения:
Каковы числовые диапазоны для прямого кинематического уравнения?
@опора:
a: 10, 170 #база
b: 10, 170 #плечо
c: 10, 148 #локоть
d: 10, 170 #вращатель запястья
e: 10, 170 #запястье вверх/вниз
f: 40, 120 #захват, меньшее значение закрывает
Большое спасибо за быстрый ответ!
Terrazas, A
Не могу поверить, что я не подумал об этом! Спасибо. Я смог установить XQuartz на свой Mac, а затем мне удалось отобразить изображение с камеры.
Я смог установить XQuartz на свой Mac, а затем мне удалось отобразить изображение с камеры.
Отзывы
Вопросы и ответы
Часто задаваемые вопросы
Позволяет ли EvoArm одновременно управлять несколькими сервоприводами?
Да. EvoArm поставляется с предустановленной прошивкой для расширенной кинематики. Вы можете одновременно управлять отдельными суставами или любой их комбинацией. Или вы можете использовать доступную функцию инверсной кинематики, чтобы задать целевое положение и ориентацию захвата, и EvoArm определит и выполнит плавный путь.
Можно ли управлять EvoArm с Raspberry Pi?
Да, EvoArm поставляется с Raspberry Pi, предварительно запрограммированным для управления оборудованием руки!
Можно ли его запрограммировать с помощью Python?
Да! Вы можете войти в включенный raspberry-pi и использовать включенные примеры Python в качестве отправной точки. Если вы знаете ROS, вы можете сделать raspberry-pi мастером ROS и публиковать команды со своего компьютера. Если вы не знакомы с ROS, вы также можете отправлять команды arm через простой и очень простой интерфейс HTTP Rest.
Если вы не знакомы с ROS, вы также можете отправлять команды arm через простой и очень простой интерфейс HTTP Rest.
Что еще нужно купить, чтобы все заработало?
Ничего! Вам понадобится телефон или компьютер с подключением к Интернету, вот и все.
Могу ли я создать собственное приложение для управления им?
Да, EvoArm предназначен для программирования с несколькими различными типами интерфейсов, которые ваше пользовательское приложение может использовать для управления рукой, включая ROS и HTTP.
Сколько он может поднять?
Предельная полезная нагрузка составляет 100 г при полном выдвижении.
Что такое повторяемость?
Приблизительно 1 мм.
Могу ли я создать и сохранить последовательность действий, которые будут выполняться рукой по запросу?
Да! Красота EvoArm заключается не только в оборудовании, но и в комплексном, протестированном и хорошо разработанном программном обеспечении, которое позволяет вам программировать его.
Может ли он многократно поднимать и размещать объекты с хорошей точностью?
Да. Посмотрите видео о том, как рука решает «Ханойские башни» или играете в настоящие крестики-нолики против игрока-человека.
Можно ли управлять этим через Wi-Fi?
Да, после установки и настройки EvoArm подключается к вашей локальной сети Wi-Fi, чтобы вы могли управлять им и программировать его со своего телефона или компьютера.
Может ли он нажать клавишу на клавиатуре?
Да! Посмотрите видео о руке, играющей песню на фортепиано.
Можем ли мы использовать это для сборки коммерческого продукта?
EvoArm предназначен для образовательных и учебных целей, он не подходит для промышленной установки.
Какова максимальная ширина открытого захвата?
55 мм или 2-1/8 дюйма
Какова его высота от основания до кончика захвата в вертикальном положении?
460 мм или 18 дюймов.
Могу ли я одновременно управлять несколькими EvoArms?
Да! Одна рука может управлять другой через HTTP или путем публикации сообщений ROS на другие руки. Программа на внешнем компьютере может управлять несколькими руками произвольной сложности.
Могу ли я получить доступ к видео с подключенной камеры?
Да! Вы можете получить доступ к камере со скоростью до 30 кадров в секунду через HTTP для ваших собственных приложений компьютерного зрения.
Могу ли я создать пользовательскую программу Arduino и запустить ее через свой собственный Arduino, подключенный к манипулятору?
Да.
Можно ли его запрограммировать на C++?
Да, конечно. Вы можете получить доступ к кадрам камеры, информации о текущем положении манипулятора и отправить команды для перемещения манипулятора, используя C++ или Python, или любой язык, поддерживающий выполнение простых HTTP-вызовов или публикацию сообщений ROS.
Могу ли я контролировать скорость движений?
Да, с очень мелкой детализацией.
Можно ли установить руку на мобильное основание?
Да. Используйте входящие в комплект батарейки АА для питания моторов и любой типичный портативный USB-блок для зарядки телефона для питания Raspberry Pi.
Нужны ли мне инструменты для сборки?
В комплект входят все необходимые инструменты.
Он работает от батареек или от сети?
Он поставляется со специальным настенным блоком питания высокой мощности, чтобы вы могли поддерживать работу EvoArm. Но если вы хотите сделать его мобильным, он также будет работать от батареек типа АА и от портативного зарядного устройства USB для телефона.
Сложно собрать?
Зависит. Ты *хочешь* чтобы это было сложно? При заказе вы можете указать «Максимальное время сборки», от нескольких часов до полной предварительной сборки.
Нужно ли его прикручивать?
Нет. Конструкция такова, что почти во всех ситуациях он не опрокидывается.